Speed in mph and Range in feet
vm = (15/22) Rd / (n ti)
Rd = 22 vm n ti / 15
| Acceleration Limits |
Laser radars, like microwave radars, are designed to measure vehicles traveling at a relatively constant speed. Vehicles changing speed greater than the accuracy during one sample period cannot be measured, speed is changing too fast. Laser radars typically have longer sample times making the acceleration limits more narrow.
|
amax = Maximum Acceleration ± vacc = Speed Accuracy ti = Sample Time |
Common sample periods, varies with model, 300, 333, 400, 500, 700 milliseconds - 0.25, 0.3, and 1/3 seconds
| Sample Period | Maximum Change in Speed |
|
|---|---|---|
| seconds | milliseconds | |
| 1/3 | 333 ms | ± 3.3 mph / second |
| 0.3 | 300 ms | ± 3.0 mph / second |
| 1/2 | 500 ms | ± 2.0 mph / second |
| 0.7 | 700 ms | ± 1.4 mph / second |
| 1 | 1000 ms | ± 1.0 mph / second |
| Scanning or Sweeping Error |
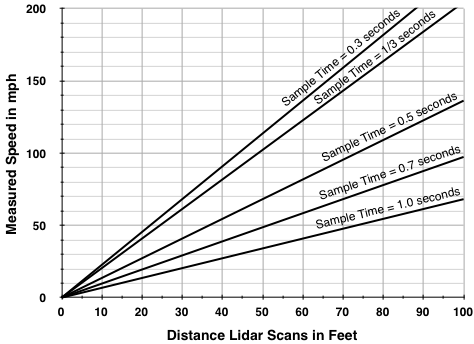
Scanning or sweeping the lidar beam across the ground such that range increases, or decreases, in a steady manner will produce a speed reading. The measured speed is a function of the change in range over sweep time. Increasing range short to long produces a receding speed, sweeping long to short range produces an approaching speed.
|
vm = measured speed Rd = distance lidar scanned |
ti = lidar sample time n = number of sample periods |
| Aiming and Alignment Errors |
The narrow laser beam and aim crosshairs must be closely aligned to very tight tolerances. Any misalignment introduces aiming errors. For the crosshairs to fall in the beam the alignment error must be less than half of the beamwidth. An alignment error that is greater than half the beamwidth will place the crosshairs outside the beam.
| Beam Divergence: | 3.0 mR 0.17° |
3.5 mR 0.20° |
4.0 mR 0.23° |
| Half Beamwidth: | 1.5 mR 0.86° |
1.25 mR 0.100° |
2.0 mR 0.115° |
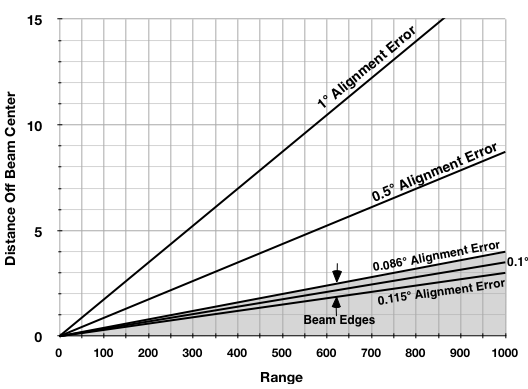
The greater the alignment error and the greater the target range, the greater the distance error between the beam center and crosshairs.
|
derr = distance off beam center R = Range ßerr = alignment angle error |
| Angle Error = | 0.086° | 0.100° | 0.115° | 0.5° | 1° |
|---|---|---|---|---|---|
| Range | Distance Beam Off Center | ||||
| 100' | 3.6 in | 4.2 in | 4.8 in | 10.5 in | 1.8' |
| 200' | 7.2 in | 8.4 in | 9.6 in | 1.8' | 3.5' |
| 300' | 10.8 in | 1.1' | 1.2' | 2.6' | 5.2' |
| 400' | 1.2' | 1.4' | 1.6' | 3.5' | 7.0' |
| 500' | 1.5' | 1.8' | 2.0' | 4.4' | 8.7' |
| 600' | 1.8' | 2.1' | 2.4' | 5.2' | 10.5' |
| 700' | 2.1' | 2.5' | 2.8' | 6.1' | 12.2' |
| 800' | 2.4' | 2.8' | 3.2' | 7.0' | 14.0' |
| 900' | 2.7' | 3.2' | 3.6' | 7.9' | 15.7' |
| 1000' | 3.0' | 3.5' | 4.0' | 8.7' | 17.5' |
| |||||||||
A 3 milliradian beamwidth edge occurs 0.086° off center, a 4 milliradian beamwidth edge occurs 0.115° from beam center.
The operator must aim the beam to an accuracy of within tenths of a degree, the aperture must be aligned within hundredths of a degree to the optical aiming device. A two-aperture system must align both apertures to thousandths of a degree, and this combination must then be aligned to the optical aiming device.
Windshield and other Interference
Operating a lidar through a windshield will diffract the infrared beam introducing an angle alignment error. All vehicles use safety glass that consist of glass covered with a thin plastic coating to reduce shattering. The coating also introduces another angle error in addition to the glass. The diffraction error is a function of material thickness and index of refraction, and the beam angle to the windshield.
Bright lights, such as halogens, beaming directly into the aperture will desensitize or entirely mask reflections. The degree of interference depends on the intensity and wavelengths of the light. The brighter and closer the light source, the greater the chance of interference.
If for any reason signal echoes are interrupted the lidar may not be able to determine target speed for that sample time. A vehicle passing between the intended target and lidar, or the lidar beam striking a tree, branches, leafs, sign, utility pole or tower, some or all returns could be missed or from other objects.
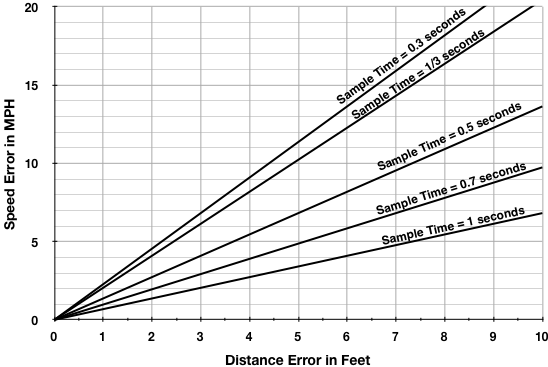
| Speed Error Due to Range Error |
Reflection from Different Vehicle Parts and Sections
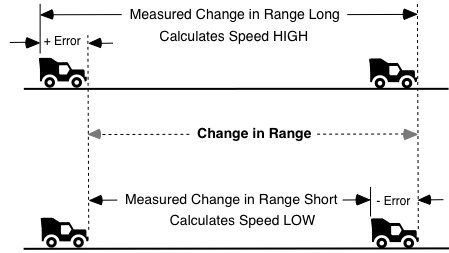
Laser radars are designed to track flat surfaces on a target vehicle. Manufactures suggest aiming at the license plate. Reflections that do not come from the same section, range, of the vehicle will cause range errors. Tracking from the back to front of a vehicle causes a high measured speed. Tracking from the front to back of a vehicle causes a low measured speed.
|
vm = measured speed derr = distance error (vehicle length) R = actual change in range ti = sample time |
|
verr = speed error derr = distance error ti = sample time |
| Range Resolution |
Range Resolution Lidar pulse width determines range resolution, the ability to separate closely spaced objects in the range dimension. The more narrow the pulse the higher the resolution. A high resolution narrow pulse could reflect from different parts of a target vehicle introducing range and speed errors.
To resolve two objects in range they must be separated by over half a pulse width. Pulse widths vary from 5 to 35 nanoseconds.
|
ds = object separation tpw = lidar pulse width c = speed of light |
|
ds = object separation in feet tpw = pulse width in nanoseconds |
|