Dense Traffic
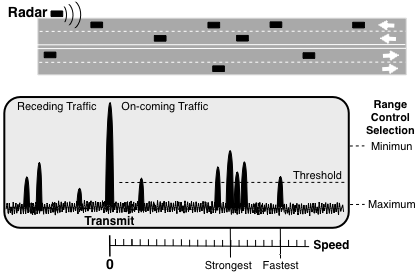
All radars display the speed of the target with the strongest echo. The strongest echo may be the closest target, the biggest target, or something in-between. A vehicle's echo varies with size, shape, and range from the radar. A compact car close to the radar may have a smaller echo than a truck at a greater range.
Dense traffic makes it difficult, if not impossible, for the radar operator to distinguish which vehicle the radar is tracking at any given time. In fast moving dense traffic a different vehicle is displayed almost every radar update period, fractions of a second to seconds.
Accuracy and Acceleration Limits
Applies to microwave and laser radars
ACCURACY
Under ideal conditions most police radars are accurate to about ±1 mph. Microwave moving mode radar also measures patrol vehicle speed to an accuracy of about ±1 mph. Moving mode target vehicle accuracy is ±2 mph.
Some microwave and laser radars specify accuracy based on a percentage of vehicle speed. A typical specification is ±1 mph up to 60 mph, and ±1.6 % for speeds over 60 mph.
ACCELERATION LIMITS
Police radars are designed to measure vehicles traveling at a relatively constant speed. Vehicles changing speed greater than radar accuracy during one sample period cannot be measured, speed is changing too fast.
amax = Maximum Acceleration
±vacc = Speed Accuracy
ti = sample time
Common sample periods are 250, 300 and 333 milliseconds, 1/4, 0.3, and 1/3 seconds.
| Sample Period | Change in Speed | |
|---|---|---|
| seconds | milliseconds | |
| 0.167 | 167 ms | ± 6.0 mph |
| 0.2 | 200 ms | ± 5.0 mph |
| 1/4 | 250 ms | ± 4.0 mph |
| 0.3 | 300 ms | ± 3.3 mph |
| 1/3 | 333 ms | ± 3.0 mph |
| 1/2 | 500 ms | ± 2.0 mph |
| 1 | 1000 ms | ± 1.0 mph |
A radar or lidar cannot measure speed if the target vehicle is changing speed greater than the radar acceleration limits. Both the cosine effect and traffic on curves introduce an acceleration component that will, if great enough, prevent the radar from obtaining a speed measurement.
Instant-On Start-up Time
Instant-on radars are not exactly instantaneous, some turn-on or warm-up time is required. Police radars cut power to the transmitter diode until ready to measure. Once power is applied to the diode it takes typically less than a half a second, but can be as long as 2 seconds, to achieve steady state. Until steady state is reached any speed measurements are completely unreliable.
One manufacturer offers models with a pulsed mode, radar transmits a short 0.067 seconds burst that some radar detectors cannot pick up. The operator uses the pulsed mode to get an estimate of speed without setting off a radar detector. The operator cannot lock any speeds but must switch to normal transmissions, take another measurement and then lock a reading. The burst is so short that speed measurements are highly unreliable and useless.
Some agencies require minimum track times for a valid speed reading, typically 3 seconds for stationary operation and 5 seconds for moving mode.
Strong Signals and Receiver Saturation
Strong echoes from large close vehicles will reduce radar detection range by automatically lowering receiver gain, automatic gain control (AGC), to protect the receiver from signal saturation. The AGC is a variable amplifier and is independent of the manual range control that sets receiver sensitivity threshold. Radar sensitivity and detection range is reduced unbeknownst to the operator.
Strong signals that saturate the radar receiver low noise amplifier or mixer will produce cross-modulation products, spurious signals and harmonics -- false signals. The interference will desensitize the receiver and can cause false speed readings. Moving mode radar has the potential to generate even more interference products because the ground echo, a very strong signal, is frequency shifted and another mixing source.
Scanning Error
Scanning errors can occur when a hand held radar is pointed or scanned in a direction that picks up the patrol vehicle air-conditioner / heater fan or motor. Fan motion and motor electromagnetic noise can produce false speed readings. False readings are proportional to fan speed and reflection angle.
Panning Error
Multi-unit radars will produce false readings when the antenna is panned around the display processor. Panning the antenna at different distances and angles produces different false speeds.
Multi-Path
The transmitted signal does not always take a direct path, radar to target and back. , Overhead and off road highway signs can and do cause signals to take multiple paths in sometimes unpredictable ways.
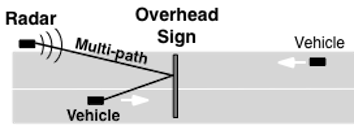
The above illustration is just one example of multi-path. A radar measuring on-coming traffic gets an overhead sign reflection from traffic receding the radar. The multi-path signal gets closer as the vehicle gets further in range, causing the Doppler shift to be positive like on-coming traffic.